Autonomous motion of mobile robot in unstructured environments domrcen 1:00 15 years ago 351 Далее Скачать
Mobile Robot Autonomous Navigation in Uneven and Unstructured Environments Chaoqun Wang 2:57 7 years ago 1 023 Далее Скачать
IROS2017: Mobile Robot Autonomous Navigation in Uneven and Unstructured Environments Lili Meng 2:57 7 years ago 459 Далее Скачать
Go Fetch: Mobile Manipulation in Unstructured Environments aslteam 3:52 4 years ago 4 032 Далее Скачать
Conv1D Energy-Aware Path Planner for Mobile Robots in Unstructured Environments Marco Visca 10:51 3 years ago 33 Далее Скачать
PAL 2020 Talk: Go Fetch: Mobile Manipulation in Unstructured Environments MIT SPARK Lab 4:56 4 years ago 610 Далее Скачать
Autonomous mobile robots navigating dynamic environments Cambridge Consultants 2:02 2 years ago 586 Далее Скачать
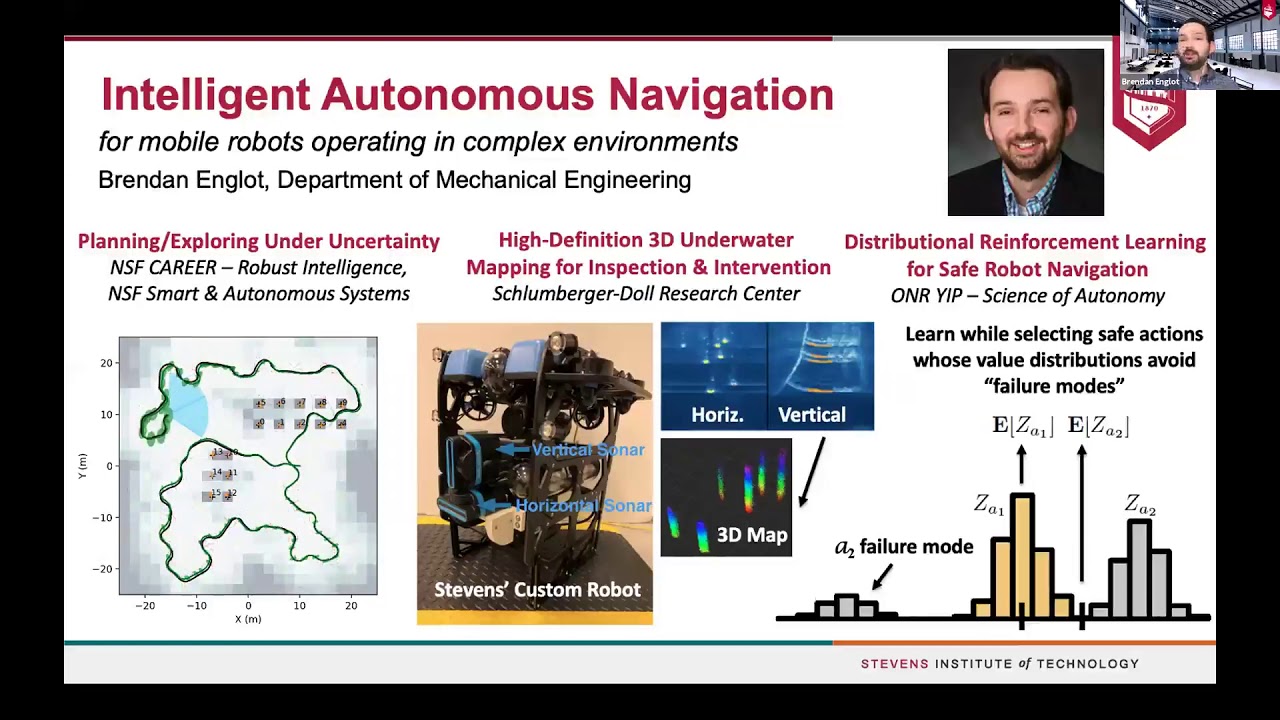
Intelligent Autonomous Navigation for Mobil Robots Operating in Complex Environments Schaefer School of Engineering & Science 15:30 3 years ago 160 Далее Скачать
Mobile Manipulation in Unknown Environments with Differential Inverse Kinematics Control Learning Systems and Robotics Lab 2:37 3 years ago 2 508 Далее Скачать
Autonomous Adaptive Modification of Unstructured Environments Maíra Saboia 0:54 6 years ago 217 Далее Скачать
Autonomous robotic exploration with simultaneous environment and traversability models learning Computational Robotics Lab at FEE-CTU in Prague 1:28 2 years ago 187 Далее Скачать
Deep Reinforcement learning for real autonomous mobile robot navigation RoblabWHGe 3:46 6 years ago 22 947 Далее Скачать
Scalable and heterogenous mobile robot fleet-based task automation in crowded hospital environments UniTartu IMS Robotics 2:07 2 years ago 183 Далее Скачать
Evaluation of Industrial Mobile Robots (IMR) in Unstructured Dynamic Environments Kristiyan Georgiev 2:19 12 years ago 514 Далее Скачать
Toward autonomous robots for demolitions in unstructured environments KilinPisa 5:55 10 years ago 303 Далее Скачать
Motion Planning of Mobile Robots for Occluded Obstacles Intelligent Robotics Lab. Utsunomiya University 1:16 3 years ago 101 Далее Скачать
ADAM: A Complete Autonomous Mobile Robot Solution from ADI Analog Devices, Inc. 3:10 2 years ago 730 Далее Скачать